Thư Viện Bài Giảng Vật Lý Đại Cương
Cho hệ lực phẳng \( \left( {{\overrightarrow{F}}_{1}},{{\overrightarrow{F}}_{2}},…,{{\overrightarrow{F}}_{n}} \right) \).
a) Định nghĩa: Vectơ chính của hệ lực \( \left( {{\overrightarrow{F}}_{1}},{{\overrightarrow{F}}_{2}},…,{{\overrightarrow{F}}_{n}} \right) \), ký hiệu \( \overrightarrow{{{R}’}} \) ; là vectơ bằng tổng các vectơ của hệ lực.
\( \overrightarrow{{{R}’}}={{\overrightarrow{F}}_{1}}+{{\overrightarrow{F}}_{2}}+…+{{\overrightarrow{F}}_{n}}=\sum\limits_{k=1}^{n}{{{\overrightarrow{F}}_{k}}} \)
b) Xác định vectơ chính

Lấy 1 điểm O trên mặt phẳng chứa lực, dựng các vectơ song song và bằng \( {{\overrightarrow{F}}_{k}} \). Dùng phương pháp cộng vectơ, ta được: \(\overrightarrow{{{R}’}}=\overrightarrow{{{{{F}’}}_{1}}}+\overrightarrow{{{{{F}’}}_{2}}}+…+\overrightarrow{{{{{F}’}}_{n}}}=\sum\limits_{k=1}^{n}{\overrightarrow{{{{{F}’}}_{k}}}}=\sum\limits_{k=1}^{n}{\overrightarrow{{{F}_{k}}}}\) là vectơ chính của hệ lực. Nó chính là vectơ khép kín đa giác hình học của các lực thành phần (Hình 2.1).
Có thể xác định vectơ chính bằng phương pháp tọa độ: Đưa vào hệ trục tốc độ Descartes vuông góc Oxy tùy ý, ta có:
\({{{R}’}_{x}}=\sum\limits_{k=1}^{n}{{{R}_{kx}}};\text{ }{{{R}’}_{y}}=\sum\limits_{k=1}^{n}{{{R}_{ky}}}\); \( {R’}=\sqrt{{R’}_{x}^{2}+{R’}_{y}^{2}} \)
\( \cos \left( \overrightarrow{R},Ox \right)=\frac{{{{{R}’}}_{x}}}{{{R}’}};\text{ }\cos \left( \overrightarrow{R},Oy \right)=\frac{{{{{R}’}}_{y}}}{{{R}’}} \)
a) Moment của lực đối với một điểm
Cho lực \( \overrightarrow{F} \) và điểm O nằm cùng trong mặt phẳng. Moment của lực đối với điểm O, ký hiệu là \( {{\tilde{m}}_{O}}(\overrightarrow{F}) \) là một đại lượng số: \( {{\tilde{m}}_{O}}(\overrightarrow{F})=\pm F.d \)
Trong đó:
+ F là cường độ của lực.
+ d là khoảng cách từ O đến đường tác dụng của \( \overrightarrow{F} \), gọi là cách tay đòn.

Lấy dấu (+) khi \( \overrightarrow{F} \) quay quanh O ngược chiều kim đồng hồ. Lấy dấu (-) khi \( \overrightarrow{F} \) quay quanh O cùng chiều kim đồng hồ (Hình 2.2).
Trị số của moment lực đối với điểm O bằng 2 lần diện tích tam giác OAB (tam giác tạo bởi vectơ lực và điểm O).
\(\left| {{{\tilde{m}}}_{O}}(\overrightarrow{F}) \right|=2{{S}_{\Delta OAB}}\)
Ta nhận thấy khi đường tác dụng đi qua O thì \( d=0\Rightarrow {{\tilde{m}}_{O}}(\overrightarrow{F})=\pm F.d=0 \)
Đơn vị của moment lực là N.m.
b) Moment chính của hệ lực phẳng đối với điểm O là một đại lượng đại số, ký hiệu \({{\mathcal{M}}_{O}}\) bằng tổng đại số moment của các lực thành phần đối với điểm đó.
\({{\mathcal{M}}_{O}}=\sum\limits_{k=1}^{n}{{{{\tilde{m}}}_{O}}({{\overrightarrow{F}}_{k}})}\)
Chú ý: Khi điểm lấy moment thay đổi thì moment của hệ lực thay đổi.

a) Định lý dời lực song song
Dời lực song song \( \overrightarrow{F} \) đặt tại A về điểm B, muốn tương đương phải thêm vào moment của \( \overrightarrow{F} \) đặt tại A lấy đối với B: \( {{\tilde{m}}_{B}}(\overrightarrow{F}) \)
\( \overrightarrow{F}\sim \left\{ \begin{align} & \overrightarrow{{{F}’}} \\ & {{{\tilde{m}}}_{B}}(\overrightarrow{F}) \\ \end{align} \right. \)
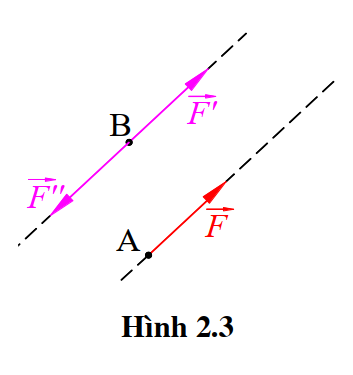
Chứng minh: Giả sử cho lực \( \overrightarrow{F} \) đặt tại A. Tại B thêm hệ lực cân bằng có các lực song song và bằng \( \overrightarrow{F} \) (Hình 2.3). Ta có:
\(\overrightarrow{F}\sim \left( \overrightarrow{F},\overrightarrow{{{F}’}},\overrightarrow{{{F}”}} \right)\sim \left( \overrightarrow{{{F}’}} \right.\) và ngẫu lực \(\left. \left( \overrightarrow{F},\overrightarrow{{{F}”}} \right) \right)\)
\( \tilde{m}\left( \overrightarrow{F},\overrightarrow{{{F}”}} \right)={{\tilde{m}}_{B}}(\overrightarrow{F}) \)
Vậy: \( \overrightarrow{F}\sim \left\{ \begin{align} & \overrightarrow{{{F}’}} \\ & {{{\tilde{m}}}_{B}}(\overrightarrow{F}) \\ \end{align} \right. \)
b) Thu gọn hệ lực phẳng về tâm O

Cho hệ lực phẳng \( \left( {{\overrightarrow{F}}_{1}},{{\overrightarrow{F}}_{2}},…,{{\overrightarrow{F}}_{n}} \right) \). Lấy một điểm O trong mặt phẳng tác dụng của hệ lực gọi là tâm thu gọn. Áp dụng định lí dời lực song song đưa các lực về O (Hình 2.4).
\( {{\overrightarrow{F}}_{1}}\sim {{\overrightarrow{{{F}’}}}_{1}} \) và ngẫu \( {{\tilde{m}}_{1}}={{\tilde{m}}_{O}}({{\overrightarrow{F}}_{1}}) \)
\( {{\overrightarrow{F}}_{2}}\sim {{\overrightarrow{{{F}’}}}_{2}} \) và ngẫu \( {{\tilde{m}}_{2}}={{\tilde{m}}_{O}}({{\overrightarrow{F}}_{2}}) \)
……..
\( {{\overrightarrow{F}}_{n}}\sim {{\overrightarrow{{{F}’}}}_{n}} \) và ngẫu \( {{\tilde{m}}_{n}}={{\tilde{m}}_{O}}({{\overrightarrow{F}}_{n}}) \)
Vậy, \( \left( {{\overrightarrow{F}}_{1}},{{\overrightarrow{F}}_{2}},…,{{\overrightarrow{F}}_{n}} \right)\sim \left( {{\overrightarrow{{{F}’}}}_{1}},{{\overrightarrow{{{F}’}}}_{2}},…,{{\overrightarrow{{{F}’}}}_{n}} \right) \) và hệ ngẫu \( ({{\tilde{m}}_{1}},{{\tilde{m}}_{2}},…,{{\tilde{m}}_{n}}) \)
Vì \( \left( {{\overrightarrow{{{F}’}}}_{1}},{{\overrightarrow{{{F}’}}}_{2}},…,{{\overrightarrow{{{F}’}}}_{n}} \right) \) là hệ lực đồng quy nên \( \left( {{\overrightarrow{{{F}’}}}_{1}},{{\overrightarrow{{{F}’}}}_{2}},…,{{\overrightarrow{{{F}’}}}_{n}} \right)\sim \overrightarrow{{{R}’}} \) và \( \overrightarrow{{{R}’}}=\sum\limits_{k=1}^{n}{{{\overrightarrow{F}}_{k}}} \) là vectơ chính của hệ \( \left( {{\overrightarrow{F}}_{1}},{{\overrightarrow{F}}_{2}},…,{{\overrightarrow{F}}_{n}} \right) \).
Và hệ ngẫu \( ({{\tilde{m}}_{1}},{{\tilde{m}}_{2}},…,{{\tilde{m}}_{n}})\sim {{\mathcal{M}}_{O}}=\sum\limits_{k=1}^{n}{{{{\tilde{m}}}_{O}}({{\overrightarrow{F}}_{k}})} \)
Kết luận: \(\left( {{\overrightarrow{F}}_{1}},{{\overrightarrow{F}}_{2}},…,{{\overrightarrow{F}}_{n}} \right)\sim \overrightarrow{{{R}’}}\) và \({{\mathcal{M}}_{O}}\).
Thu gọn hệ lực về tâm O, ta được một lực bằng vectơ chính của hệ lực và một ngẫu lực có moment bằng moment chính của hệ lực đối với tâm O.
c) Các dạng chuẩn của hệ lực phẳng
+ \( \overrightarrow{{{R}’}}=0,\text{ }{{\mathcal{M}}_{O}}=0\Rightarrow \left( {{\overrightarrow{F}}_{1}},{{\overrightarrow{F}}_{2}},…,{{\overrightarrow{F}}_{n}} \right)\sim 0 \): hệ lực phẳng cân bằng.
+ \( \overrightarrow{{{R}’}}=0,\text{ }{{\mathcal{M}}_{O}}\ne 0\Rightarrow \left( {{\overrightarrow{F}}_{1}},{{\overrightarrow{F}}_{2}},…,{{\overrightarrow{F}}_{n}} \right)\sim {{\mathcal{M}}_{O}} \): hệ lực phẳng thu về ngẫu lực.
+ \( \overrightarrow{{{R}’}}\ne 0,\text{ }{{\mathcal{M}}_{O}}=0\Rightarrow \left( {{\overrightarrow{F}}_{1}},{{\overrightarrow{F}}_{2}},…,{{\overrightarrow{F}}_{n}} \right)\sim \overrightarrow{{{R}’}} \) đặt tại O: hệ lực phẳng có hợp lực đặt tại O.
+ \( \overrightarrow{{{R}’}}\ne 0,\text{ }{{\mathcal{M}}_{O}}\ne 0\Rightarrow \left( {{\overrightarrow{F}}_{1}},{{\overrightarrow{F}}_{2}},…,{{\overrightarrow{F}}_{n}} \right)\sim \overrightarrow{{{R}’}} \) và \( {{\mathcal{M}}_{O}} \). Theo định lí dời lực song song, ta có thể tìm O’ để dời \( \overrightarrow{{{R}’}} \) và \( {{\mathcal{M}}_{O}} \) về O’ chỉ còn tương đương với \( \overrightarrow{{{R}’}} \). Trong trường hợp này: \( \left( {{\overrightarrow{F}}_{1}},{{\overrightarrow{F}}_{2}},…,{{\overrightarrow{F}}_{n}} \right)\sim \overrightarrow{{{R}’}} \) đặt tại \( {O}’\ne O \).
d) Định lí biến thiên moment chính
Moment chính của hệ lực đối với tâm thu gọn mới bằng moment chính của hệ lực đối với tâm thu gọn cũ cộng với moment của vectơ chính đặt tại tâm cũ lấy với tâm mới.
\( {{\mathcal{M}}_{O1}}={{\mathcal{M}}_{O}}+{{\tilde{m}}_{O1}}({{\overrightarrow{{{R}’}}}_{O}}) \)

Chứng minh: (Hình 2.5)
\( \left( {{\overrightarrow{F}}_{1}},{{\overrightarrow{F}}_{2}},…,{{\overrightarrow{F}}_{n}} \right)\sim \overrightarrow{{{R}’}} và {{\mathcal{M}}_{O}}\sim \overrightarrow{{{R}’}} \) và \( {{\mathcal{M}}_{O}}+{{\tilde{m}}_{O1}}(\overrightarrow{{{{{R}’}}_{O}}}) \)
Mặt khác thu gọn \( \left( {{\overrightarrow{F}}_{1}},{{\overrightarrow{F}}_{2}},…,{{\overrightarrow{F}}_{n}} \right) \) về thẳng O1 ta được: \( \left( {{\overrightarrow{F}}_{1}},{{\overrightarrow{F}}_{2}},…,{{\overrightarrow{F}}_{n}} \right)\sim \overrightarrow{{{R}’}} \) và \( {{\mathcal{M}}_{O1}} \)
Vậy, so sánh, ta có: \( {{\mathcal{M}}_{O1}}={{\mathcal{M}}_{O}}+{{\tilde{m}}_{O1}}(\overrightarrow{{{{{R}’}}_{O}}}) \)
e) Định lý Varignon
Nếu hệ có hợp lực, moment của hợp lực đối với 1 điểm bất kỳ bằng tổng moment các lực thành phần lấy đối với điểm đó.
\( {{\tilde{m}}_{O}}(\overrightarrow{R})=\sum\limits_{k=1}^{n}{{{{\tilde{m}}}_{O}}(\overrightarrow{{{F}_{k}}})} \) nếu \(\overrightarrow{R}\sim \left( {{\overrightarrow{F}}_{1}},{{\overrightarrow{F}}_{2}},…,{{\overrightarrow{F}}_{n}} \right)\)

Chứng minh: (Hình 2.6)
Ta có: \(\left( {{\overrightarrow{F}}_{1}},{{\overrightarrow{F}}_{2}},…,{{\overrightarrow{F}}_{n}} \right)\sim \overrightarrow{R}\), thu gọn hệ lực về O: \(\left( {{\overrightarrow{F}}_{1}},{{\overrightarrow{F}}_{2}},…,{{\overrightarrow{F}}_{n}} \right)\sim \overrightarrow{R}\) và \({{\mathcal{M}}_{O}}\).
Mặt khác, dời song song \( \overrightarrow{R} \) về O: \( \overrightarrow{R}\sim \overrightarrow{{{R}’}} \) và \( {{\tilde{m}}_{O}}(\overrightarrow{R}) \) (định lý dời lực song song)
Vậy, \( \overrightarrow{R} \) và \( {{\mathcal{M}}_{O}} \) \( \sim \overrightarrow{{{R}’}} \) và \( {{\tilde{m}}_{O}}(\overrightarrow{R}) \) hay \( \overrightarrow{R} \) và \( \sim \overrightarrow{{{R}’}} \) và \( {{\tilde{m}}_{O}}(\overrightarrow{R})={{\mathcal{M}}_{O}}=\sum\limits_{k=1}^{n}{{{{\tilde{m}}}_{O}}({{\overrightarrow{F}}_{k}})} \)









