Thư Viện Bài Giảng Vật Lý Đại Cương
a) Vectơ moment của lực đối với 1 điểm
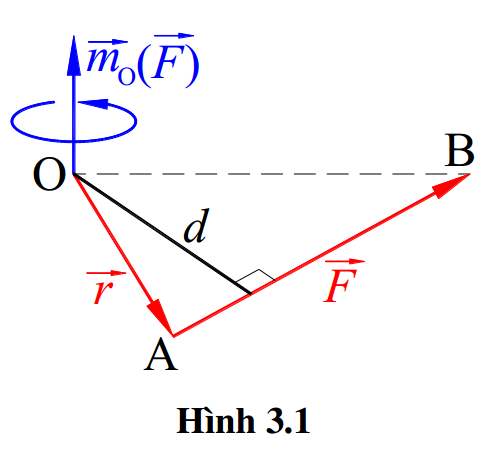
Vectơ moment của lực \( \overrightarrow{F} \) đối với điểm O, được kí hiệu \( {{\vec{m}}_{O}}(\overrightarrow{F}) \) là vectơ có (Hình 3.1):
– Phương: vuông góc với mặt phẳng qua O và chứa \( \overrightarrow{F} \).
– Chiều: nhìn từ đầu mút xuống thấy \( \overrightarrow{F} \) quay ngược chiều kim đồng hồ quanh O.
– Trị số: \( F\cdot d \) (với d là cánh tay đòn, là khoảng cách từ O đến đường tác dụng của \( \overrightarrow{F} \)).
+ Nhận xét:
– Trị số của vectơ moment lực \( \overrightarrow{F} \) đối với điểm O bằng 2 lần diện tích tam giác OAB.
– Nếu đưa vào vectơ \( \overrightarrow{OA}=\vec{r} \) là vectơ định vị điểm đặt lực \( \overrightarrow{F} \) đối với O thì ta có: \( {{\vec{m}}_{O}}(\overrightarrow{F})=\vec{r}\times \overrightarrow{F}\,\,\,\,\,\,\,(3.2) \)
b) Moment của lực đối với 1 trục

Moment của lực \( \overrightarrow{F} \) đối với trục \( \Delta \) , kí hiệu \( {{\tilde{m}}_{\Delta }}(\overrightarrow{F}) \) là moment đại số của lực \( \overrightarrow{{{F}’}} \) đối với điểm O, trong đó \( \overrightarrow{{{F}’}} \) là hình chiếu của \( \overrightarrow{F} \) lên mặt phẳng \( \pi \) vuông góc với trục \( \Delta \) , còn O là giao điểm của \( \pi \) với trục \( \Delta \) (Hình 3.2).
\( {{\tilde{m}}_{\Delta }}(\overrightarrow{F})={{\tilde{m}}_{O}}(\overrightarrow{{{F}’}})=\pm {F}’\cdot {d}’\,\,\,\,\,\,\,\,\,\,(3.3) \)
Nhận xét: Khi \( \overrightarrow{F} \) cắt hay song song với trục \( \Delta \) ( \( \overrightarrow{F} \) và \( \Delta \) đồng phẳng) thì: \( {{\tilde{m}}_{\Delta }}(\overrightarrow{F})=0 \).
c) Định lí liên hệ giữa moment của lực đối với một điểm và với 1 trục
Định lí: Moment của lực \( \overrightarrow{F} \) đối với trục \( \Delta \) bằng hình chiếu lên trục ấy của vectơ moment của lực \( \overrightarrow{F} \) đối với điểm O nằm trên \( \Delta \) .
\( {{\tilde{m}}_{\Delta }}(\overrightarrow{F})=h{{c}_{\Delta }}{{\tilde{m}}_{O}}(\overrightarrow{F})\,\,\,\,\,\,\,\,\,\,(3.4) \), với \( O\in \Delta \)
Chứng minh:
Chọn trục z trùng với trục \( \Delta \) và mặt phẳng tọa độ Oxy trùng với mặt phẳng \( \pi \).
Gọi \( {A}’ \) là hình chiếu của điểm đặt A của lực \( \overrightarrow{F} \) trên mặt phẳng Oxy. Nếu A có các tọa độ (x,y,z) thì \( {A}’ \) có các tọa độ là (x,y,0).
Từ định nghĩa moment của lực đối với một trục đối với một trục, ta có:
\( {{\tilde{m}}_{\Delta }}(\overrightarrow{F})={{\vec{m}}_{O}}(\overrightarrow{{{F}’}})=h{{c}_{Oz}}\left[ {{{\vec{m}}}_{O}}(\overrightarrow{{{F}’}}) \right]\,\,\,\,\,\,\,(1) \)
Dựa vào biểu thức vectơ moment của lực đối với một điểm, ta viết:
\( {{\vec{m}}_{O}}(\overrightarrow{{{F}’}})=\vec{\rho }\wedge \overrightarrow{{{F}’}}=\left[ \begin{matrix} \overrightarrow{i} & \overrightarrow{j} & {\vec{k}} \\ x & y & 0 \\ {{F}_{x}} & {{F}_{y}} & 0 \\\end{matrix} \right] \), trong đó: \( \vec{\rho }=\overrightarrow{O{A}’} \).
Từ đó ta dễ dàng tính được: \( h{{c}_{Oz}}\left[ {{{\vec{m}}}_{O}}(\overrightarrow{{{F}’}}) \right]=x{{F}_{y}}-y{{F}_{x}} \).
Mà \( h{{c}_{Oz}}\left[ {{{\vec{m}}}_{O}}(\overrightarrow{F}) \right]=x{{F}_{y}}-y{{F}_{x}} \) nên \( h{{c}_{Oz}}\left[ {{{\vec{m}}}_{O}}(\overrightarrow{{{F}’}}) \right]=h{{c}_{Oz}}\left[ {{{\vec{m}}}_{O}}(\overrightarrow{F}) \right]\,\,\,\,\,\,\,\,\,\,\,(2) \)
Từ (1) và (2), ta có: \( {{\tilde{m}}_{\Delta }}(\overrightarrow{F})=h{{c}_{Oz}}\left[ {{{\vec{m}}}_{O}}(\overrightarrow{{{F}’}}) \right]=h{{c}_{Oz}}\left[ {{{\vec{m}}}_{O}}(\overrightarrow{F}) \right] \) (đpcm)
d) Vectơ moment chính của hệ lực không gian đối với điểm O
Kí hiệu \( \overrightarrow{{{\mathcal{M}}_{O}}} \) là một vectơ bằng tổng hình học các vectơ moment của các lực lấy với điểm O đó.
\( \overrightarrow{{{\mathcal{M}}_{O}}}=\sum\limits_{k=1}^{n}{{{{\vec{m}}}_{O}}(\overrightarrow{{{F}_{k}}})}\,\,\,\,\,\,\,\,\,\,(3.5) \)










